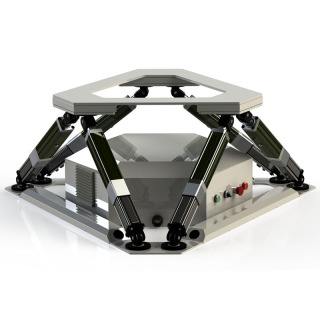
Base de movimento do simulador de navio
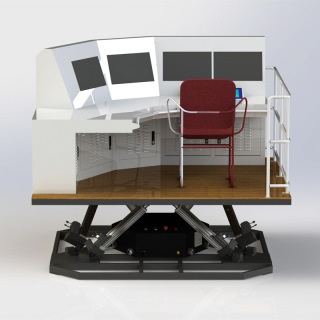
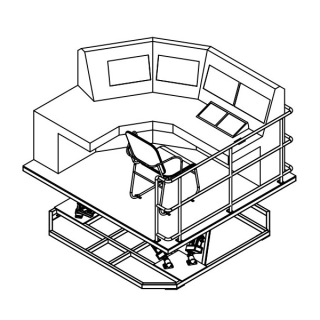
O produto simulador de navegação equipado com plataforma de movimento 6-DOF pode atender a várias necessidades de treinamento de negócios, como treinamento de tripulação, treinamento de pilotos, treinamento de operador VTS, treinamento de operador de rádio GMDSS e outros treinamentos comerciais especiais (operação de rebocador, operação de pesca, navegação no gelo área, navegação interior, operação de iate, emergência de derramamento de óleo, busca e salvamento) e também pode ser usado para pesquisa científica, como demonstração de engenharia portuária e de navegação, verificação inteligente de equipamentos marítimos, etc.
A plataforma de movimento de seis graus de liberdade pode simular a atitude de movimento do navio no processo de operação, realizar o teste do equipamento do navio, fornecer aos usuários dados completos do teste do estado do mar e auxiliar e cooperar com os usuários para concluir o experimento de teste do equipamento do navio; Ele pode fornecer equipamentos de treinamento de direção de acordo com os requisitos do usuário e equipamentos virtuais para simular o ambiente de condução do navio e a postura do movimento. Podemos fornecer personalização de produto, interface de entrada de espectro de onda personalizada, atender aos requisitos do usuário para as condições do mar e combinar a tecnologia VR para restaurar altamente a cena e o ambiente.

Especificação principal:
Performance do sistema
| Postura | Unidade | Amplitude | Velocidade |
| levantar | milímetros | ±200 | 250mm/s |
| Surto | milímetros | ±200 | 250mm/s |
| balanço | milímetros | ±200 | 250mm/s |
| Tom | ° | ±25 | 25°/s |
| Rolar | ° | ±25 | 25°/s |
| Guinada | ° | ±25 | 25°/s |
Especificação de carga útil
| Peso do Produto | 330kg |
| Carga útil | 500kg |
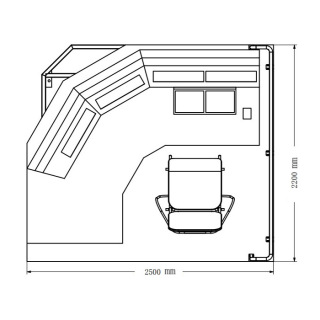
Dimensões do produto
| Comprimento | 2500 mm |
| Largura | 2200 mm |
| Min. Altura | 820 mm |
Requerimentos poderosos
| Fonte de energia | 380V trifásico |
| Conexão | Ethernet |
Sistema de controle (armário elétrico)

Sistema de controle: o software de controle embutido é executado no controlador principal e o controlador de movimento usa o controlador de movimento de barramento de alto desempenho Gugao e usa o algoritmo de cinemática direta e inversa desenvolvido independentemente por nossa empresa para realizar o controle de movimento do seis graus - plataforma de movimento de liberdade.
O software de controle inclui, entre outros, os seguintes módulos funcionais: módulo de função de autoinspeção do sistema, módulo de função de conexão de rede, módulo de função de configuração de parâmetros, módulo de função de máquina de estado, módulo de função de pré-processamento de dados, módulo de função de planejamento de trajetória, módulo de função de cálculo cinemático , módulo de função de comunicação de barramento, módulo de função de E/S digital, módulo de função de realimentação de estado, módulo de função de alarme de falha e módulo de função de segurança.
O software de controle fornece a interface de desenvolvimento secundária e abre a interface de comunicação e o protocolo para a Parte A. A plataforma de seis graus de liberdade funciona sem problemas, sem problemas e sem tropeçar. Os algoritmos de cinemática direta e inversa retroalimentam a atitude da plataforma ou os dados de posição do cilindro elétrico em tempo real. O algoritmo tem a função de proteção de segurança interna para a plataforma, que não causará danos à plataforma se o usuário inserir os dados por engano!