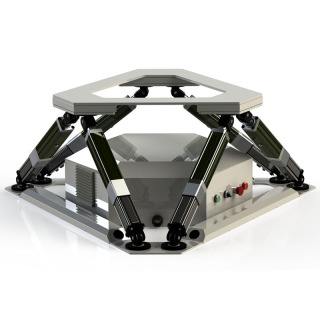
Base de movimento do simulador de condução automóvel
As bases de movimento são amplamente utilizadas em vários simuladores de treinamento, como simuladores de vôo, simuladores de navios, plataformas de simulação de pouso e decolagem de helicópteros navais, simuladores de tanques, simuladores de condução de carros, simuladores de condução de trens, simuladores de terremotos, filmes dinâmicos, equipamentos de entretenimento e outros campos , e até mesmo na atracação de espaçonaves espaciais e na atracação de reabastecimento de aviões-tanque; Equipamento de entretenimento cultural, novo equipamento de experiência de entretenimento interativo, simulação de engenharia, avaliação de design, teste, experimento, treinamento de tarefas, avaliação de treinamento, simulação ambiental, recorrência de eventos, etc.
Especificação principal:
Performance do sistema
Postura Unidade Amplitude Velocidade levantar milímetros ±160 375mm/s Surto milímetros ±160 375mm/s balanço milímetros ±160 375mm/s Tom ° ±16 15°/s Rolar ° ±16 15°/s Guinada ° ±16 15°/s
Especificação de carga útil
| Peso do Produto | 349kg |
| Carga útil | 1000kg |
Dimensões do produto
| Comprimento | 2000 mm |
| Largura | 1515 mm |
| Min. Altura | 780 mm |
Requerimentos poderosos
| Fonte de energia | 380V trifásico |
| Conexão | Ethernet |
Sistema de controle (armário elétrico)

Sistema de controle: o software de controle embutido é executado no controlador principal e o controlador de movimento usa o controlador de movimento de barramento de alto desempenho Gugao e usa o algoritmo de cinemática direta e inversa desenvolvido independentemente por nossa empresa para realizar o controle de movimento do seis graus - plataforma de movimento de liberdade.
O software de controle inclui, entre outros, os seguintes módulos funcionais: módulo de função de autoinspeção do sistema, módulo de função de conexão de rede, módulo de função de configuração de parâmetros, módulo de função de máquina de estado, módulo de função de pré-processamento de dados, módulo de função de planejamento de trajetória, módulo de função de cálculo cinemático , módulo de função de comunicação de barramento, módulo de função de E/S digital, módulo de função de realimentação de estado, módulo de função de alarme de falha e módulo de função de segurança.
O software de controle fornece a interface de desenvolvimento secundária e abre a interface de comunicação e o protocolo para a Parte A. A plataforma de seis graus de liberdade funciona sem problemas, sem problemas e sem tropeçar. Os algoritmos de cinemática direta e inversa retroalimentam a atitude da plataforma ou os dados de posição do cilindro elétrico em tempo real. O algoritmo tem a função de proteção de segurança interna para a plataforma, que não causará danos à plataforma se o usuário inserir os dados por engano!